




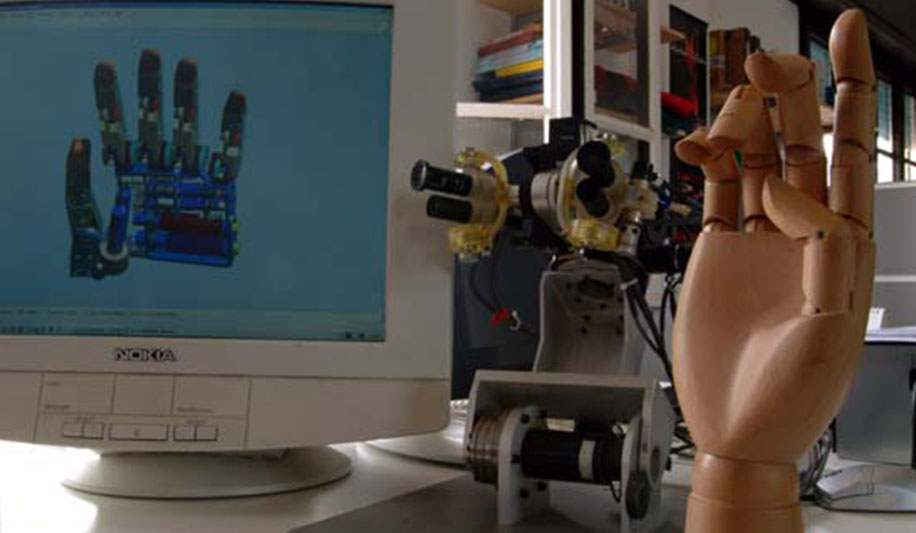
Humanoids, hexoskeletons, experimental special instruments and tools, green processing technologies.
Danieli Telerobot collaborates actively in robotic research project both as consortium partner and as technology provider subcontractor.
Some recent projects:
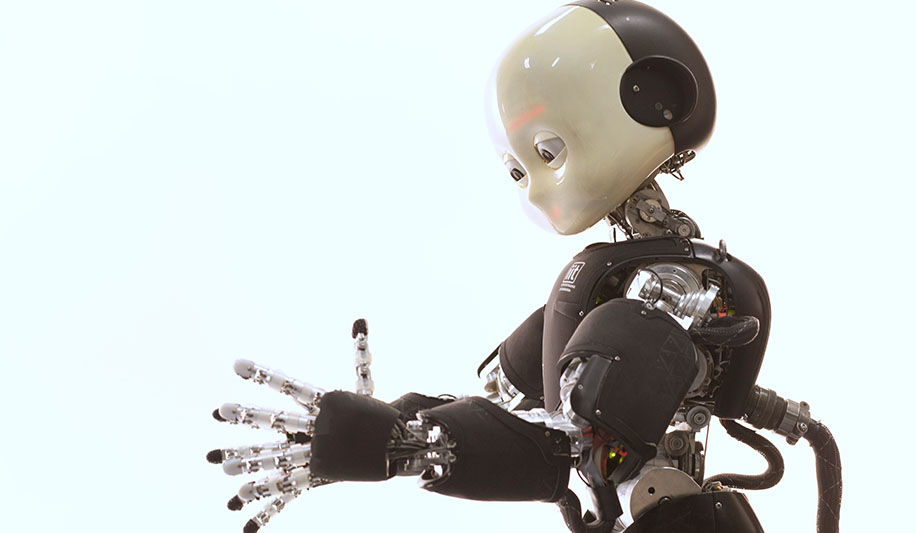
Within the RobotCub consortium, DANIELI Telerobot has played the role of coordinator and director for the mechanical design of the iCub humanoid platform and continues providing support to the Italian Institute of Technology (IIT) in the mechanical development and integration of its robotic devices and systems. e Sant'Anna, an underactuated gripper integrated on board a power exoskeleton.
DANIELI Telerobot remains involved, providing engineering support as well as direct participation in numerous research projects in the field of robotics and materials.



DANIELI TELEROBOT LABS S.R.L. a Socio Unico
Corso Ferdinando Maria Perrone 47 R
16152 Genova GE
p.iva 02215430998
Phone: +39 010 534 1731
info@dtlabs.it
© Danieli Telerobot Labs surl 2019
Cookie Policy e Privacy Policy
Società soggetta a direzione e coordinamento da parte della Danieli & C. Officine Meccaniche Spa







