

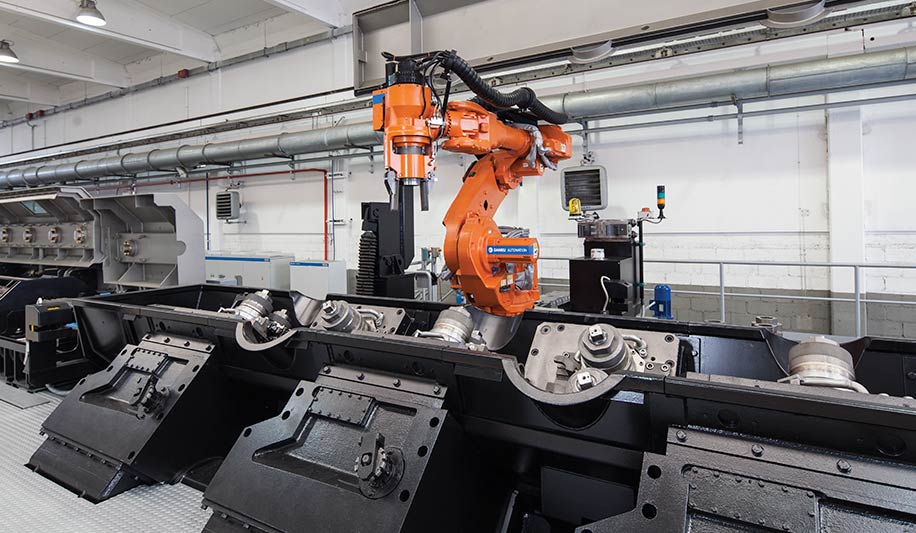
Robotic applications specially designed to improve process operations, making them safer and faster, in each production area: furnace, casting, rolling mills and process lines.
The most advanced alliance between industrial robotics – specifically manufactured for use in harsh environments - and process automation fully compliant with Industry 4.0 systems and architectures.

SAMPLE: EAF/LF steel bath temperature measurement and physical samples taking for lab analysis with automatic cartridge loading/unloading. Constant depth and tilt of the lance, compliant with the EAF range of positions, is set and monitored from the HMI; tap to tap time is reduced since EAF can remain in power-on mode during the sampling
The robotic cell is provided with water cooled sampling lance, metal shields and fiberglass thermal dress; the anti-collision function allows the automatic repositioning of the lance in case of solid scraps or obstacles on the trajectory of the robot.

Q-MELT EBT: automatic EBT cleaning, opening and unclogging.
Automatic nozzle position acquisition by means of a 3d vision system; remotely operated control of the robot by jog functions through the Joybot portable console.

Q-MELT SCAN: automatic visual inspection of the internal of the EAF through a 360° video camera mounted on a dedicated tool compliant with the sampling lance (no tool-change required).
All images can be visualized on a PC monitor /tablet/smartphone using the dedicated application integrated in the HMI.
Sample & measurement, Lancing, Shroud manipulation, Tundish powder.
Q-CAST LADLE
"Zero operators" multifunction robotic cell to allow fully automatic operations in ladle area composed by:
- robot #1, 6-axis anthropomorphic arm for lancing, sampling & measurements, powder addition,
- robot #2, 4-axis electric/hydraulic servo-manipulator for shroud handling,
working in cooperative mode in fully automatic or remotely controlled configuration.
Sampling & measurement
Nozzle position detection
Shroud manipulation
Lancing
Powder addition

Sliding gate hydraulic cylinder manipulation and mounting.
Fully automatic or remotely operated operation through the Joybot portable console with no human intervention underneath the ladle.

Powder feeding.
Q-CAST LADLE MOULD
Automatic casting powder dosage and feeding in continuous casting machines with up to four different hoppers.
Optional cast-eye sensor-camera to check the powder thickness and bath coverage.

Tag, Mark, Punch.
Q-CAST TAG
Automatic tagging system with fully customizable metal labels resistant up to 850°C welded (with/without pins) on billets, blooms, beam blanks on the cooling plate; complete products traceability

Green project® - qualified Danieli partner - marking & reading systems technology.
TAG
BUNDLE
Automatic label welding system for bundled rods; a 3d vision system is used to identify the "best" bar for label application.
COIL
Label clip holding system fixed on the coil strap; a 3d vision system identifies the "best" point for label placing.
Complete products traceability.
MARK
Q-ROLL MARK
Automatic paint spray marking system in multi (dot matrix) or mono (handwritten-like characters) version for flat products; complete products traceability
Green project® - qualified Danieli partner - marking & reading systems technology.

Q-ROLL DESTRAP
Automatic system for strap removal from steel coils, profiles or tube bundles; a 3d video system is used to identify number and position of straps that are cut with a dedicate pneumatic scissor and winded, compacted and ejected as scraps.
Q-ROLL DEBURR
Stand-alone robotic cell proposed with different custom designs ranging from billets chamfering to heavy blooms deburring and from saw-generated burr to heavy cutting torch effect.
A 3d vision system allows the robot to identify and follow edges even in unknown position.
Q-ROLL SAMPLE PREPARATION
Stand-alone fully automatic cell with 2-cooperating robots cell for master samples cutting, deburring and marking downstream the rolling mill area.
Positioning and shape of the masters are automatically detected to perform the sample withdrawal and deliver with no auxiliary pusher system or manipulator.
The solution can be customized and adapts to existing layouts without any mechanical modification.

Q-ZINC SKIM
Automatic skimming and dross removal system for zinc baths.
A continuous cyclic passing across the surface of the zinc driven by a control system that adapts the skimming speed to the dross production amount in compliance with the bath level.

Q-ZINC INGOT
Automatic feeding of the zinc pot with zinc and aluminum ingots or jumbo premixed ingots.
Automatic control of zinc pot receipe and Zn-Al consumption, level control, reduction of waves during ingot loading, overall reduction of dross production.
Q-ZINC DESTRAP
Automatic system for strap removal from ingots palletts; a 3d video system is used to identify number and position of straps that are cut with a dedicate pneumatic scissor and winded, compacted and ejected as scraps.

Caps/pipe-protectors handling and screwing robotic cell.
The system is composed by:

Antropomorphic pallettizer robot for a wide range of couplings handling complete with custom-fit conveyors and fixtures.
Ink-jet and punching robots for pipes marking
Green project® - qualified Danieli partner - marking & reading systems technology.







DANIELI TELEROBOT LABS S.R.L. a Socio Unico
Corso Ferdinando Maria Perrone 47 R
16152 Genova GE
p.iva 02215430998
Phone: +39 010 534 1731
info@dtlabs.it
© Danieli Telerobot Labs surl 2019
Cookie Policy e Privacy Policy
Società soggetta a direzione e coordinamento da parte della Danieli & C. Officine Meccaniche Spa